Apparatus for Remote Control of Humanoid Robots (ARCHR)
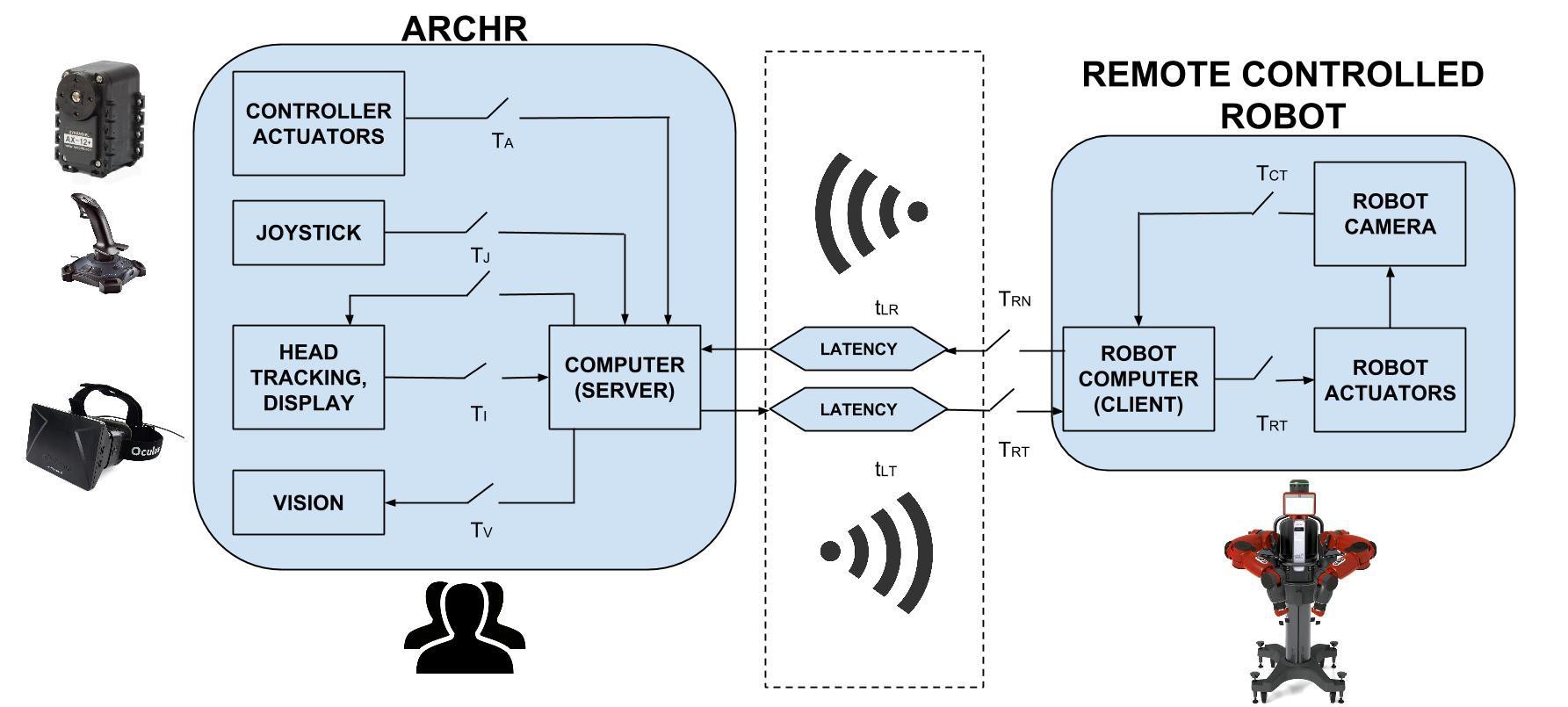
Our team designed, assembled, and tested an innovative and intuitive control structure for tele-operated humanoid robots. The system is called the Apparatus for Remote Control of Humanoid Robots (ARCHR). The ARCHR system is comprised of two distinct components: a standalone, physical apparatus and a virtual reality system.
The first component is the physical remote controller for the robot which will henceforth be referred to as the Control Apparatus. The Control Apparatus itself is a physical structure that is kinematically scaled to represent the tele-operated robot which may be combined with a joystick to facilitate movement as needed. The user manually articulates the various appendages of the physical structure in order to control the remote robot’s appendages accordingly. The second component of the ARCHR system is a Virtual Reality System and will henceforth be referred to as such. This system is be worn by the user and tracks their head movement while simultaneously streaming a video feed to the user. The video stream is received from a stereovision system in order to give the user a sense of depth without the need for complex visual processing.
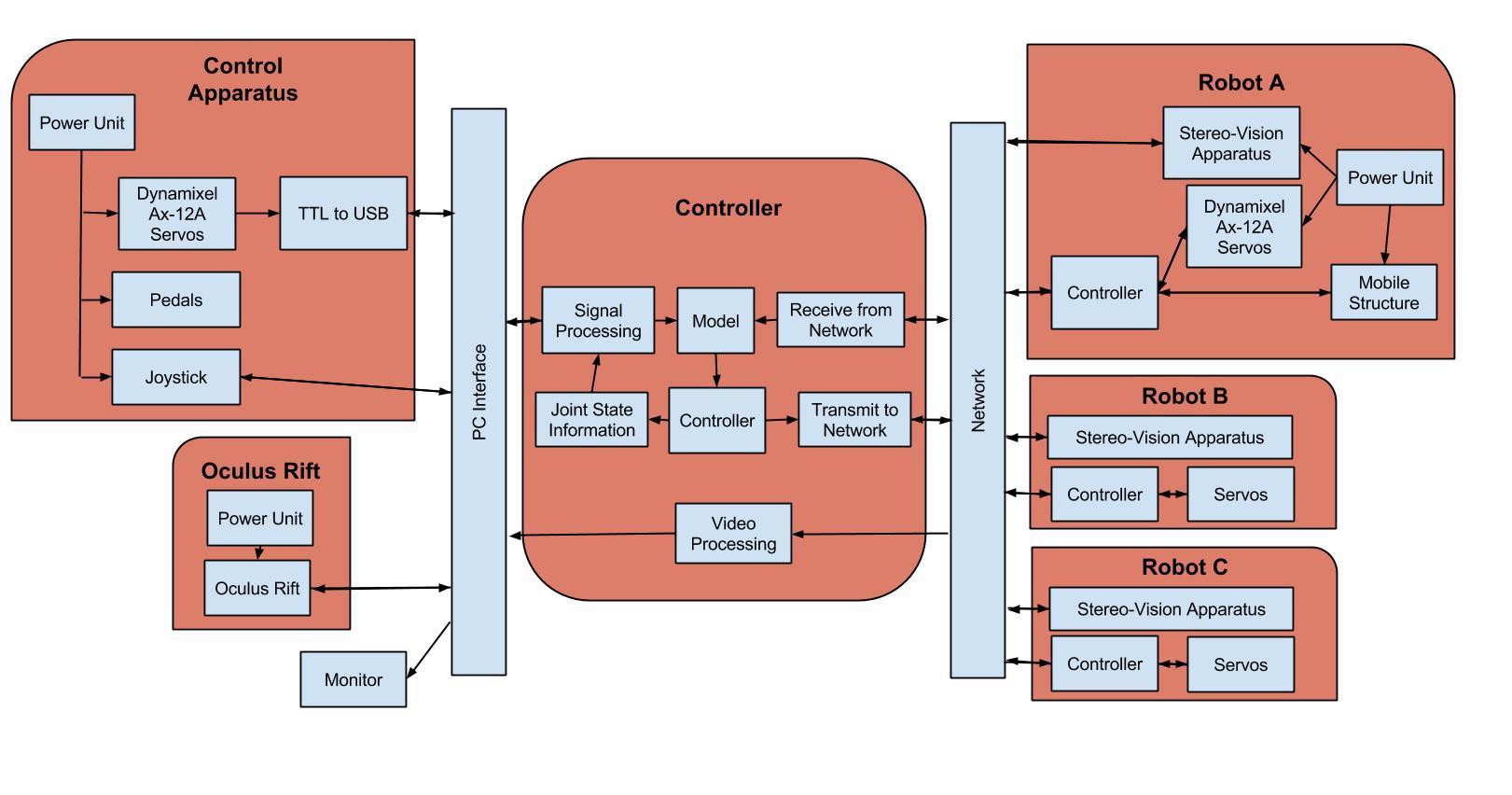
The ARCHR system is able to operate over a network with transmission characteristics capable of controlling a remote robot within a 200kbps bandwidth and 200ms delay. This is because in harsh, unideal operating conditions, the system must be able to effectively transfer data despite bandwidth restrictions and time delays. Multiple humanoid robot models can interface with this system, including but not limited to: MiniBot (a miniature robot designed and built by the team), virtual DRC Hubo, and Baxter. Above all, the system is easy to use, robust, and intuitive so that anyone can use the device with little to no training. Moreover, it provides the user with a range of abilities such as “Peg in Hole” in order to operate in a human-engineered environment. Progress, updates, source code and tutorials were logged and kept open-sourced so that they may be duplicated and improved upon by third parties.
