

Underwater Legged Robot – AquaShoko: This robot is an underwater legged robot designed to develop and test walking algorithms in non-terrestrial environments. This robot is IP-68 rated at 5m.
Compact Repair Inspection Telepresence Robot (CRITR): There are many issues that plague modern pipe inspection and repair robots. These include but are not limited to exorbitant costs, lack of operational capabilities, lack of system transparency, and lack of an intuitive control. To address these issues, we propose the Compact Repair Inspection Telepresence Robot (CRITR). The CRITR, is an open-source solution that will provide greater operational capabilities and a platform that will not be restricted to pipe operations. This document contains information about the fabrication and functionality of CRITR.

40 ft Tall Robot Head in the Cloud: A pan tilt “art project” robot head designed to give the user a 40 foot view, when logged in remotely. This was inspired by the XKCD comic entitled “Depth Perception”

Pioneer Ground Robots: The Pioneer 3AT and 3DX ground robots are designed to carry a laptop sensor and other equipment. They are used for indoor and outdoor multi-agent experimentation, human robot interaction, and other such research. These robots were also used for the annual “Whisky and Widgets” event as an automatic whisky delivery device.
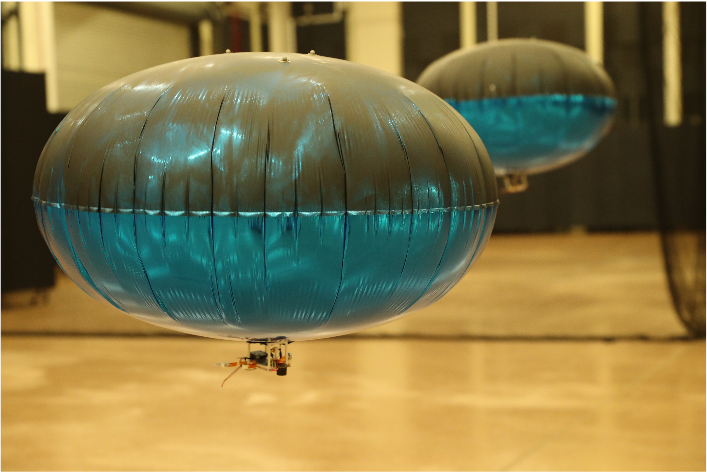
Lighter-Than-Air Autonomous Agents (LTA3): These agents (blimps) are used for real-world swarm and emergent behavior research. Many agents can fly simultaneously, they are safe to operate around humans, and can collide with each other without causing damage. These agents are originally based on the GT-MAB agents by Fumin Zhang at Georgia Tech.

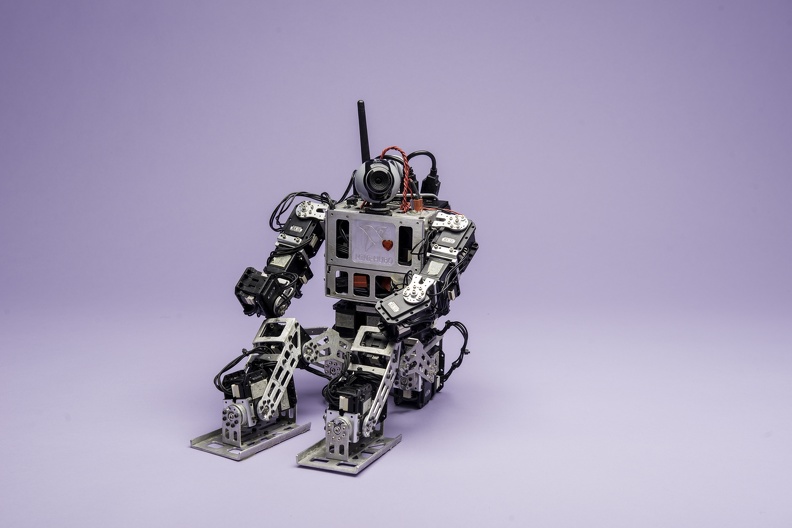
DARwIn-OP: Child size humanoid robot used for walking gait development, human robot interaction, and participation in the RoboCup Humanoid League.

Battle Bot Rolling Chassis: This rolling chassis is being modified to become a 120kg robot to compete in the yearly Battle Bots Competition in California.
Mini-Hubo: A kinematically scaled version of the KHR-4 model of the Hubo Robot. This OpenSource and OpenHardware platform what the robot that eventually turned into the DARwIn-OP
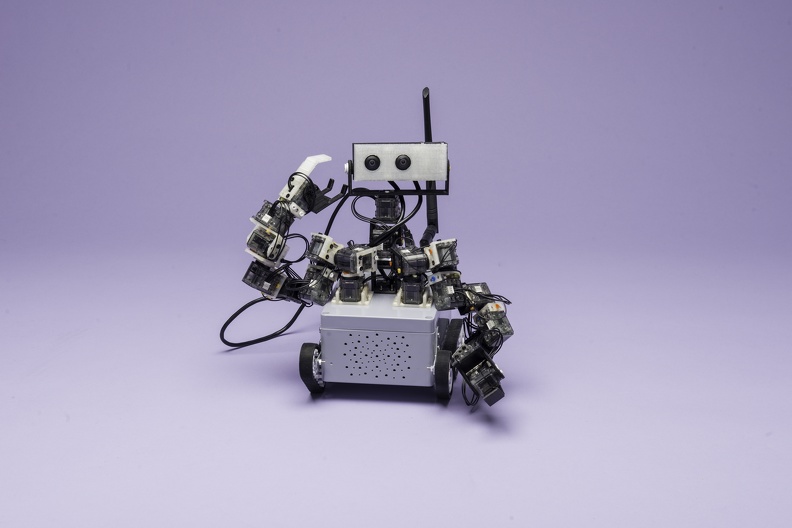
 MiniBot: MiniBot is a custom designed and 3D printed robot we refer to as Minibot and was created as a part of a senior design project at George Mason University. It is comprised of a series of Dynamixel AX-12 and AX-18 servos, daisy-chained together, and two USB cameras connected separately. All of the pieces are connected using 3D printed, plastic brackets, available on Thingiverse, and the robot is attached to a 1/2″ thick, 7.5″x12″ board. The board is attached to the mobile platform, an MMP8, by velcro for easy removal. From the videos, it can be see that the blue robot is the controller for the red robot.
MiniBot: MiniBot is a custom designed and 3D printed robot we refer to as Minibot and was created as a part of a senior design project at George Mason University. It is comprised of a series of Dynamixel AX-12 and AX-18 servos, daisy-chained together, and two USB cameras connected separately. All of the pieces are connected using 3D printed, plastic brackets, available on Thingiverse, and the robot is attached to a 1/2″ thick, 7.5″x12″ board. The board is attached to the mobile platform, an MMP8, by velcro for easy removal. From the videos, it can be see that the blue robot is the controller for the red robot.
OpenHubo: OpenHubo is a collection of models of KAIST / Rainbow humanoid robots. As of release 0.6.x, the collection includes: Hubo2 (Torso-base), Hubo2 (Right-foot-base), Hubo+ (Torso-base), Hubo+ (Right-foot-base), Hubo+ (No-Shell model). These models have inertia and mass properties to accurate to within about 1 kg of the physical robot. Masses such as cables are not well represented in CAD, while mechanical components are accurately sized and massed. The result should be accurate enough for simulation though Open Dynamics Engine (ODE) and similar engines.
OpenDRC-Hubo: OpenDRC-Hubo is a dynamic model of the of the KAIST / Rainbow humanoid robot DRC-Hubo. The specifications for this robot were determined through testing by Team DRC-Hubo of the DARPA Robotics Challenge. This model has inertia and mass properties to accurate to within about 1 kg of the physical robot. Masses such as cables are not well represented in CAD, while mechanical components are accurately sized and massed. The result should be accurate enough for simulation though Open Dynamics Engine (ODE) and similar engines.

Baxter: Meet Baxter – the safe, flexible, affordable alternative to outsourced labor and fixed automation. Leading companies across North America have already integrated Baxter into their workforce, and gained a competitive advantage for their business in the process. Baxter is a proven solution for a wide range of tasks – from line loading and machine tending, to packaging and material handling. If you walk the floor of your facility and see lightweight parts being handled near people, you’ve likely just found a great job for Baxter.1