
Robots

“The Narrative Machine” Feature in the Washington Post
The work we are doing called “The Narrative Machine” with Daniel Lofaro and Edger Edress has been featured in the Washington Post today!!! Front page of the Metro section =-). See pictures for the “in print” article and the link
“The Narrative Machine” Feature in the Washington Post
The work we are doing called “The Narrative Machine” with Daniel Lofaro and Edger Edress has been featured in the Washington Post today!!! Front page of the Metro section =-). See pictures for the “in print” article and the link

In Water Test: Centroid vectoring for attitude control of floating base robots
Centroid vectoring for attitude control of floating base robots with Matko Orsag from the University of Zagreb, Croatia. Y-axis underwater bench test. 0 deg, 12 deg, and -12 deg step input.
In Water Test: Centroid vectoring for attitude control of floating base robots
Centroid vectoring for attitude control of floating base robots with Matko Orsag from the University of Zagreb, Croatia. Y-axis underwater bench test. 0 deg, 12 deg, and -12 deg step input.
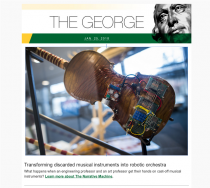
The Narrative Machine is the featured article in “The George”
Click Here for the full article An engineering professor and an art professor have embarked on an ambitious project: They want to create an orchestra of robotic gadgets made of cast-off musical instruments that will autonomously perform an opera bearing
The Narrative Machine is the featured article in “The George”
Click Here for the full article An engineering professor and an art professor have embarked on an ambitious project: They want to create an orchestra of robotic gadgets made of cast-off musical instruments that will autonomously perform an opera bearing

Preparing for fully submerged robot test with US/Croatia project
Working with our colleagues from the University of Zagreb, Croatia. We are making use of telepresence and remote connections to facilitate our efforts. The robot is being preprepared for its fully submerged test scheduled for later this month.
Preparing for fully submerged robot test with US/Croatia project
Working with our colleagues from the University of Zagreb, Croatia. We are making use of telepresence and remote connections to facilitate our efforts. The robot is being preprepared for its fully submerged test scheduled for later this month.
Lofaro Featured on IEEE Spectrum Video Friday
Link: https://spectrum.ieee.org/automaton/robotics/robotics-hardware/video-friday-122917 Daniel Lofaro talks about how he works very hard to make things easier and how co-robotics, where humans and robots collaborate is the way forward. Bringing cost down cost and better AI is critical for this. He talks
Lofaro Featured on IEEE Spectrum Video Friday
Link: https://spectrum.ieee.org/automaton/robotics/robotics-hardware/video-friday-122917 Daniel Lofaro talks about how he works very hard to make things easier and how co-robotics, where humans and robots collaborate is the way forward. Bringing cost down cost and better AI is critical for this. He talks

Daniel M. Lofaro’s interview for Robots in Depth on the topic of “Co-Robots”
Daniel Lofaro talks about how he works very hard to make things easier and how co-robotics, where humans and robots collaborate is the way forward. Bringing cost down cost and better AI is critical for this. Host: Per Sjöborg, Robots
Daniel M. Lofaro’s interview for Robots in Depth on the topic of “Co-Robots”
Daniel Lofaro talks about how he works very hard to make things easier and how co-robotics, where humans and robots collaborate is the way forward. Bringing cost down cost and better AI is critical for this. Host: Per Sjöborg, Robots

“The Narrative Machine” – Cello Drum – Video
Cello Drum completed for the project between the Art and Engineering Departments. The project is called “The Narrative Machine” Stay tuned for more info!!!
“The Narrative Machine” – Cello Drum – Video
Cello Drum completed for the project between the Art and Engineering Departments. The project is called “The Narrative Machine” Stay tuned for more info!!!

Presentation/Demonstration at the Impact Design Summit with DARPA Tech Shop and Autodesk
***Click Here for More Pictures*** Impact Design Summit at the Building Museum in Washington D.C. with Autodesk and DARPA Tech Shop. Showing off some awesome “robots for good.”
Presentation/Demonstration at the Impact Design Summit with DARPA Tech Shop and Autodesk
***Click Here for More Pictures*** Impact Design Summit at the Building Museum in Washington D.C. with Autodesk and DARPA Tech Shop. Showing off some awesome “robots for good.”

Making robots serve alcohol at the “Whiskey & Widgits” event
Presenting at the Volgenau School of Engineering’s annual alumni reception in the atrium as part of Alumni Weekend 2017. ***Click here for more pictures**
Making robots serve alcohol at the “Whiskey & Widgits” event
Presenting at the Volgenau School of Engineering’s annual alumni reception in the atrium as part of Alumni Weekend 2017. ***Click here for more pictures**

Presentation for the International Visitor Leadership Program (IVLP) sponsored by the Department of State
Talking with some very impressive woman from around the world about how to increase female participation in key parts of the sciences. These amazing woman are apart of the International Visitor Leadership Program (IVLP) sponsored by the Department of State.
Presentation for the International Visitor Leadership Program (IVLP) sponsored by the Department of State
Talking with some very impressive woman from around the world about how to increase female participation in key parts of the sciences. These amazing woman are apart of the International Visitor Leadership Program (IVLP) sponsored by the Department of State.